Categorias
Nossos times desenvolvem tecnologias que disputam títulos em várias categorias de competições, como:
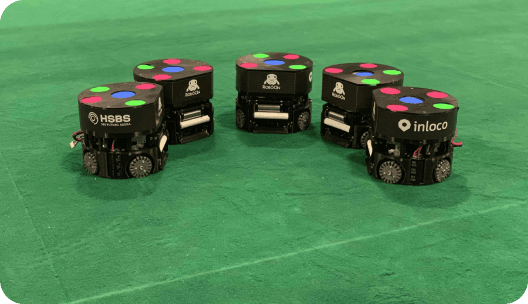
Small Size League
RoboCup | LARC
Small Size League (SSL) é uma competição que requer o desenvolvimento de várias áreas. Nós desenvolvemos o modelo mecânico, os sistemas eletrônicos e de comunicação e a inteligência artifical dos robôs. Um jogo de SSL ocorre entre duas equipes de seis robôs cada. Os robôs tem dimensões limitadas, o robô deve caber dentro de um círculo de 180 mm de diâmetro e não deve ter mais de 150 mm de altura. Todos os objetos no campo são identificados e normalizados pelos sistema de visão que processa os dados proveniente pelas 4 cameras.
SSL - Resultados
Very Small Size Soccer
LARC | IronCup
Very Small Size Soccer (VSSS) é uma competição que requer desenvolvimento nas principais áreas do RobôCIn, visão computacional para detectar informações sobre a situação do jogo; inteligência artificial para planejar todos os movimentos dos robôs, para que a equipe possa marcar gols e se defender dos adversários; e robótica que envolve eletrônica e mecânica para criar agentes que precisam se mover perfeitamente em campo.

Nossas abordagens
Deep Learning
Nessa abordagem nós treinamos os agentes usando aprendizado por reforço, ou seja, damos uma recompensa para ações boas e ruins dos agentes, ele aprende a maximizar a recompensa e com isso as melhores ações para cada situação.
Determinic
Nessa abordagem nós usamos algoritmos determinísticos para decidir as ações dos nossos robôs, ou seja, programamos a estratégia e decisões que nossos jogadores fazem.
VSSS - Resultados
2D Simulation
RoboCup | LARC | IronCup
Na Simulação 2D duas equipes de onze agentes autônomos jogam futebol em um estádio de futebol virtual bidimensional representado por um servidor central, chamado SoccerServer. Este servidor sabe tudo sobre o jogo, ou seja, a posição atual de todos os jogadores e a bola, a física e assim por diante. O jogo conta ainda com a comunicação entre o servidor e cada agente. Por um lado, cada jogador recebe uma entrada relativa e ruidosa de seus sensores virtuais (visuais, acústicos e físicos) e, por outro lado, pode executar alguns comandos básicos (como correr, girar ou chutar) para influenciar seu ambiente.

Simulação 2D - Resultados
Drone
LARC
A categoria de drones do RobôCIn foi projetada para o desenvolvimento de robôs voadores autônomos e tecnologias relacionadas. Para validar nosso trabalho, buscamos participar de competições e simpósios, principalmente a LARC e a Robocup Brasil. Nela, participamos da Flying Robots Trial League. Nessa competição, existem quatro desafios que o robô deve ser capaz de realizar autonomamente, geralmente envolvendo a leitura e detecção de objetos, a busca e movimentação entre plataformas e o transporte de cargas.

Drones - Resultados